Multicore communication on WaRP7 using Remote Processor Messaging bus (RPMsg)
The Remote Processor Messaging (RPMsg) is a messaging bus that allows the communication between cores in a multicore processor.
This tutorial shows how to use the RPMsg demo examples from FreeRTOS_BSP_1.0.1_iMX7D
BSP on WaRP7.
The software releases used in this tutorial are:
NOTE
More information about the Linux releases available for WaRP7 can be found here.
Kernel
The kernel needs to be customized to support RPMsg and Cortex-M4 on WaRP7.
- Apply the following patch to enable RPMsg support on WaRP7. Download this patch here.
From 6cb41eba0996f05e7fa06b8e834516043145b96b Mon Sep 17 00:00:00 2001
From: Vanessa Maegima <vanessa.maegima@nxp.com>
Date: Wed, 23 Nov 2016 10:25:37 -0200
Subject: [PATCH 1/2] ARM: imx: Add imx7s-warp RPMsg support
The RPMsg driver is hardcoded to support imx7d-sdb.
Add support for imx7s-warp.
Signed-off-by: Vanessa Maegima <vanessa.maegima@nxp.com>
---
arch/arm/mach-imx/imx_rpmsg.c | 7 +++++++
1 file changed, 7 insertions(+)
diff --git a/arch/arm/mach-imx/imx_rpmsg.c b/arch/arm/mach-imx/imx_rpmsg.c
index 6e3aed1..4af740a 100644
--- a/arch/arm/mach-imx/imx_rpmsg.c
+++ b/arch/arm/mach-imx/imx_rpmsg.c
@@ -273,6 +273,7 @@ static struct imx_rpmsg_vproc imx_rpmsg_vprocs[] = {
static const struct of_device_id imx_rpmsg_dt_ids[] = {
{ .compatible = "fsl,imx6sx-rpmsg", },
{ .compatible = "fsl,imx7d-rpmsg", },
+ { .compatible = "fsl,imx7s-rpmsg", },
{ /* sentinel */ }
};
MODULE_DEVICE_TABLE(of, imx_rpmsg_dt_ids);
@@ -293,6 +294,12 @@ static int imx_rpmsg_probe(struct platform_device *pdev)
rpdev->vring[0] = 0xBFFF0000;
rpdev->vring[1] = 0xBFFF8000;
}
+ ret = of_device_is_compatible(np, "fsl,imx7s-rpmsg");
+ if (ret) {
+ /* hardcodes here now. */
+ rpdev->vring[0] = 0x9FFF0000;
+ rpdev->vring[1] = 0x9FFF8000;
+ }
} else {
break;
}
--
2.7.4
- Apply the following patch to add the Cortex-M4 support on WaRP7. Download this patch here.
From 038e88ce99724e7f57afcd6694f83009bb1551e8 Mon Sep 17 00:00:00 2001
From: Vanessa Maegima <vanessa.maegima@nxp.com>
Date: Wed, 23 Nov 2016 10:32:02 -0200
Subject: [PATCH 2/2] ARM: dts: imx7s-warp-m4: Add i.MX7s M4 support
Add support for Cortex-M4 on i.mx7s-warp.
Signed-off-by: Vanessa Maegima <vanessa.maegima@nxp.com>
---
arch/arm/boot/dts/Makefile | 3 ++-
arch/arm/boot/dts/imx7s-warp-m4.dts | 9 +++++++++
arch/arm/boot/dts/imx7s-warp-m4.dtsi | 26 ++++++++++++++++++++++++++
3 files changed, 37 insertions(+), 1 deletion(-)
create mode 100644 arch/arm/boot/dts/imx7s-warp-m4.dts
create mode 100644 arch/arm/boot/dts/imx7s-warp-m4.dtsi
diff --git a/arch/arm/boot/dts/Makefile b/arch/arm/boot/dts/Makefile
index 8c18e59..d1de4c7 100644
--- a/arch/arm/boot/dts/Makefile
+++ b/arch/arm/boot/dts/Makefile
@@ -401,7 +401,8 @@ dtb-$(CONFIG_SOC_IMX7D) += \
imx7d-sdb-reva-qspi.dtb \
imx7d-sdb-reva-touch.dtb \
imx7d-sdb-reva-wm8960.dtb \
- imx7s-warp.dtb
+ imx7s-warp.dtb \
+ imx7s-warp-m4.dtb
dtb-$(CONFIG_SOC_LS1021A) += \
ls1021a-qds.dtb \
ls1021a-twr.dtb
diff --git a/arch/arm/boot/dts/imx7s-warp-m4.dts b/arch/arm/boot/dts/imx7s-warp-m4.dts
new file mode 100644
index 0000000..53cbe95
--- /dev/null
+++ b/arch/arm/boot/dts/imx7s-warp-m4.dts
@@ -0,0 +1,9 @@
+/*
+ * Copyright (C) 2016 Freescale Semiconductor, Inc.
+ *
+ * This program is free software; you can redistribute it and/or modify
+ * it under the terms of the GNU General Public License version 2 as
+ * published by the Free Software Foundation.
+ */
+#include "imx7s-warp.dts"
+#include "imx7s-warp-m4.dtsi"
diff --git a/arch/arm/boot/dts/imx7s-warp-m4.dtsi b/arch/arm/boot/dts/imx7s-warp-m4.dtsi
new file mode 100644
index 0000000..b856fec
--- /dev/null
+++ b/arch/arm/boot/dts/imx7s-warp-m4.dtsi
@@ -0,0 +1,26 @@
+/*
+ * Copyright (C) 2016 Freescale Semiconductor, Inc.
+ *
+ * This program is free software; you can redistribute it and/or modify
+ * it under the terms of the GNU General Public License version 2 as
+ * published by the Free Software Foundation.
+ */
+
+/ {
+ memory {
+ linux,usable-memory = <0x80000000 0x1ff00000>;
+ };
+ m4_tcm: tcml@007f8000 {
+ compatible = "fsl, m4_tcml";
+ reg = <0x007f8000 0x8000>;
+ };
+};
+
+&ocram {
+ reg = <0x00901000 0xf000>;
+};
+
+&rpmsg{
+ compatible = "fsl,imx7s-rpmsg";
+ status = "okay";
+};
--
2.7.4
Building Linux
To build the Linux image, follow the next command lines:
$ make imx_v7_defconfig
$ make
Copy imx7s-warp-m4.dtb and zImage to the boot partition of the SD card.
FreeRTOS
The RPMsg buffer (VRING) address needs to be customized in the FreeRTOS source code to the proper values used by WaRP7.
The VRING address is defined at: FreeRTOS_BSP_1.0.1_iMX7D/middleware/multicore/open-amp/porting/imx7d-m4/platform_info.c.
On i.MX7D-SabreSD:
#define VRING0_BASE 0xBFFF0000
#define VRING1_BASE 0xBFFF8000
For WaRP7, change these values to:
#define VRING0_BASE 0x9FFF0000
#define VRING1_BASE 0x9FFF8000
Building FreeRTOS
There are four demos to test the RPMsg messaging in this BSP:
pingpong_bmpingpong_freertosstr_echo_bmstr_echo_freertos
In this tutorial, the pingpong_freertos demo is used, but the same procedure
can be done for all four demos.
- First, make sure
cmakeis installed:
$ sudo apt-get install cmake
- Then download the gcc-arm-none-eabi toolchain and export its location as ARMGCC_DIR:
$ export ARMGCC_DIR=<toolchain_dir>
- Enter the demo
armgccdirectory and run the build command:
$ cd <freertos_dir>/examples/imx7d_sdb_m4/demo_apps/rpmsg/pingpong_freertos/armgcc
$ ./build_all.sh
- The previous command generates the debug and release binaries (.bin files) to
boot the M4 core. These files are located in the
debugand in thereleasefolders. Copy one of these binaries to the boot partition of the SD card.
Running the demo
-
Open two serial consoles, one at
/dev/ttyUSB0for Cortex-A7 to boot Linux and other at/dev/ttyUSB1for Cortex-M4 to boot FreeRTOS. -
Power up the board and stop at U-boot on the A7 console.
-
Enter the following commands to load the FreeRTOS binary to M4.
=> fatload mmc 0:1 0x7F8000 rpmsg_pingpong_freertos_example.bin
=> dcache flush
=> bootaux 0x7F8000
## Starting auxiliary core at 0x007F8000 ...
NOTE
Remember to update the binary name if running a different demo.
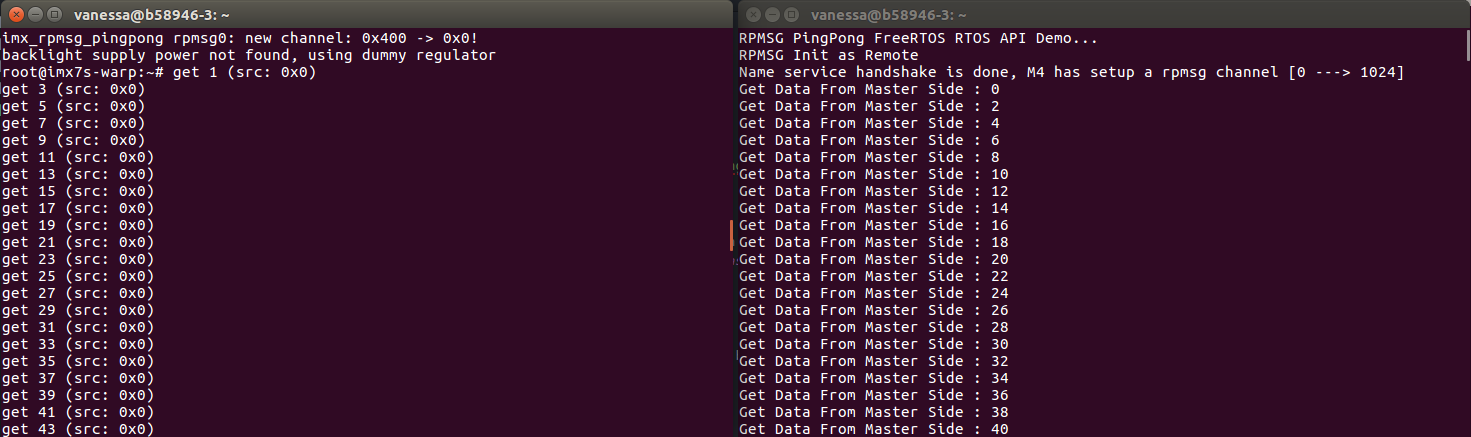
- The M4 console will print the demo information.
RPMSG PingPong FreeRTOS RTOS API Demo...
RPMSG Init as Remote
- Run the following command on the A7 console to boot Linux:
=> run bootcmd
- In the Linux user space, enter the following command to start the communication between cores:
# modprobe imx_rpmsg_pingpong
NOTE
The command above is used only for the pingpong demos. For the str_echo demos,
use:
# modprobe imx_rpmsg_tty
- A7 and M4 cores will send messages to each other.